

⭐ 다익스트라 알고리즘
길찾기 알고리즘 중의 하나로 최단경로를 구할 수 있는 알고리즘입니다.
그래프에서 한 정점으로부터 다른 모든 정점까지의 최단 거리를 구합니다.
실생활에서는 내비게이션, 도로 교통망 최적화, 인터넷 네트워크 라우팅 등에 사용되며,
게임에서는 몬스터 AI, 넓은 거리 맵 생성, 길찾기 및 이동 시스템 등에 사용됩니다.
탐색 방식
● 아래 링크에서 다양한 길찾기 알고리즘의 작동 방식을 직접 실행해볼 수 있습니다.
○ https://qiao.github.io/PathFinding.js/visual/


● 위의 그래프에서 A → D 노드로 가는 탐색 과정을 살펴보겠습니다.
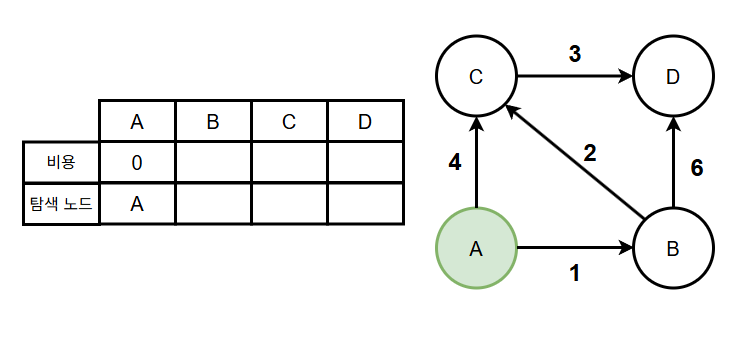
● A에서 시작하기 때문에 A를 방문처리 해줍니다.
● 나머지 노드에는 방문하지 않았으므로 아직 거리 비용을 모릅니다.
● 방문하지 않은 노드들은 정확한 거리를 모르기 때문에 매우 큰 수를 가지고 있습니다.
○ 최소 비용을 구하기 때문에 임의의 큰 수를 할당해놓음

● A에 인접한 B와 C의 비용을 계산합니다.
● 아직 A노드에서 이동하지 않았으므로 탐색 노드는 추가하지 않습니다.
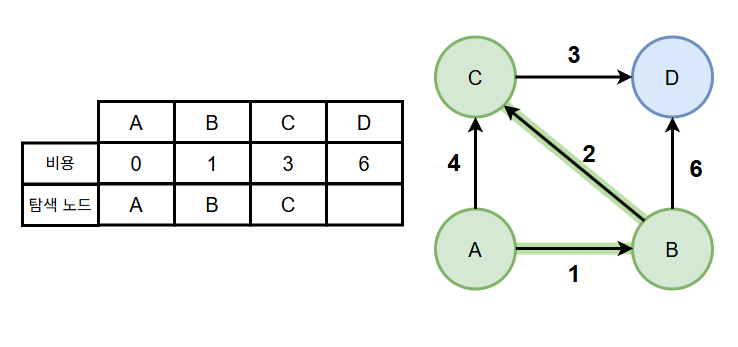
● A에서 가장 가까운 B 노드로 이동합니다.

● A → C의 거리비용이 4였고, A → B → C의 거리 비용이 3이므로 C까지의 비용을 3으로 변경합니다.
● B 노드를 탐색 처리합니다.
● B에 인접하고 탐색하지 않은 노드인 C, D를 탐색 대상에 추가합니다.
● 위와 같은 과정을 반복하며 C 노드로 이동합니다.
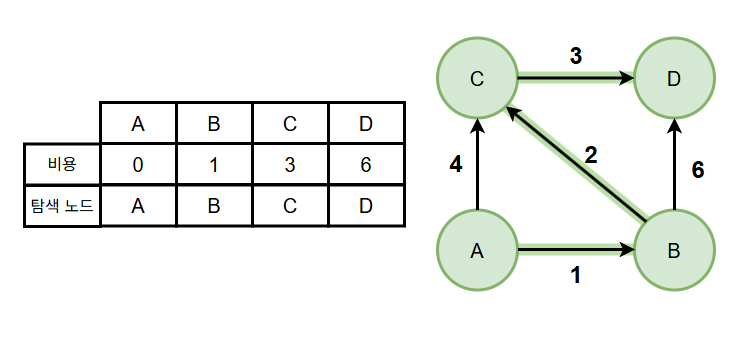
● 목표 지점에 도달하면 탐색이 종료됩니다.
장점과 단점
장점
● 우선순위 큐를 이용해 효율적인 탐색이 가능합니다.
● 시작점에서 모든 노드로의 최단 경로 탐색이 가능합니다.
● 구현이 간단하며 직관적입니다.
단점
● 음수 가중치가 있는 경우에는 사용이 불가능합니다. → 벨만-포드 알고리즘으로 해결 가능
● 그래프(경우의 수)가 큰 경우 성능 저하가 발생합니다.
다익스트라 알고리즘 코드

● 위와 같은 그래프에서 A → D 최단거리를 구하는 코드입니다.
using NUnit.Framework;
using System.Collections.Generic;
using UnityEngine;
public class DijkstraNode
{
public int index; //번호
public Vector2 pos; //해당 노드의 좌표
public float distance; //시작점으로 부터 현재 노드까지의 누적 거리
public DijkstraNode parent; //경로 추적용 부모 노드
public DijkstraNode(int index, Vector2 pos, float distance, DijkstraNode parent = null)
{
this.index = index;
this.pos = pos;
this.distance = distance;
this.parent = parent;
}
}
public class DijkstraExample : MonoBehaviour
{
private void Start()
{
int n = 4; //노드 개수
int startIndex = 0; //시작 노드 인덱스 A
int goalIndex = 3; //목표 노드 인덱스 D
//각각의 노드에 좌표 설정해주기
Vector2[] positions = new Vector2[4]
{
new Vector2(1, 0), //A
new Vector2(0, 1), //B
new Vector2(0, 0), //C
new Vector2(1, 1) //D
};
//그래프 구성, (목표 노드, 목표까지의 비용)
List<(int to, float cost)>[] graph = new List<(int to, float cost)>[n];
for(int i = 0; i < n; i++)
{
graph[i] = new List<(int to, float cost)>();
}
//비용 정보 추가
graph[0].Add((1, 1)); //A → B (1)
graph[0].Add((2, 4)); //A → C (4)
graph[1].Add((2, 2)); //B → C (2)
graph[1].Add((3, 6)); //B → D (6)
graph[2].Add((3, 3)); //C → D (3)
//각 노드까지의 최소 거리 저장 배열
float[] distances = new float[n];
for(int i = 0; i < n; i++)
{
distances[i] = float.MaxValue;
}
//시작 위치
distances[startIndex] = 0;
//방문 여부 저장 배열
bool[] visited = new bool[n];
//탐색 대기 리스트
List<DijkstraNode> openList = new List<DijkstraNode>();
//시작 지점 추가
openList.Add(new DijkstraNode(startIndex, positions[startIndex], 0));
//탐색 루프
while(openList.Count > 0)
{
//거리 기준으로 정렬
openList.Sort((a, b) => a.distance.CompareTo(b.distance));
//최소 거리 노드 선택
var current = openList[0];
//선택한 애는 탐색 대상에서 제외해주기
openList.RemoveAt(0);
//방문한 노드면 스킵하기
if (visited[current.index])
continue;
//방문 처리
visited[current.index] = true;
//목표 노드 도착시 경로 복원
if(current.index == goalIndex)
{
//경로 저장용 리스트
var path = new List<int>();
var temp = current;
//부모 따라 역추적
while(temp != null)
{
path.Add(temp.index);
temp = temp.parent;
}
//D - C - B - A
//역순으로 뒤집기, A - B - C - D
path.Reverse();
Debug.Log("Dijkstra Path " + string.Join(" => ", path));
Debug.Log("Distance " + current.distance);
break;
}
foreach(var neighbor in graph[current.index])
{
//이미 방문한 노드일 경우 패스
if (visited[neighbor.to])
continue;
//현재 노드까지의 거리 + 간선 비용
float t = current.distance + neighbor.cost;
//더 짧은 경로 발견시
if(t < distances[neighbor.to])
{
distances[neighbor.to] = t;
//새로운 노드 추가
openList.Add(new DijkstraNode(neighbor.to, positions[neighbor.to], t, current));
}
}
}
}
}● 해당 코드에서는 리스트를 이용하여 노드들을 관리했지만, 우선순위 큐를 이용한다면 중간에 따로 정렬해주는 과정이 필요없어지기 때문에 더 효율적인 구조로 만들 수 있습니다.
'개발, IT > 디자인 패턴 & 알고리즘' 카테고리의 다른 글
| [알고리즘] A* 알고리즘 (에이스타 알고리즘) (1) | 2025.11.21 |
|---|---|
| [디자인 패턴] FSM (Finite-State Machine) 유한 상태 기계 (0) | 2025.11.12 |
| [디자인 패턴] MVC, MVP, MVVM 패턴 (0) | 2025.11.12 |
| [디자인 패턴] 옵저버 패턴 (Observer Pattern) (0) | 2025.10.22 |
| [디자인 패턴] 어댑터 패턴 (Adapter Pattern) (0) | 2025.10.21 |